
1 概述
隨工業、物流自動化發展浪潮,全球物流IT投資額持續快速增長。其中倉儲物流是物流產業中最重要的環節之一,也是對網絡需求最多的物流子場景,倉儲IT投資在整個物流行業中占比達47%。從行業趨勢上看,倉儲物流行業向信息化、自動化、智能化發展。
物流行業需求快速發展的同時,自動機器人控制、調度對WLAN通信實時性、可靠性、并發能力提出了前所未有的要求。而針對傳統上網或人工倉儲應用的現有網絡難以滿足特性和規格要求,為WLAN自動倉儲應用方案帶來新的機遇和挑戰。本方案采用Wi-Fi 6技術與AGV技術結合,解決了無人倉高性價比、多機高并發、低時延、高可靠無線通信的要求。未來還可以擴展至工業環境其他的AGV場景。
1.1 背景
隨著工業、物流自動化發展的浪潮,全球物流IT投資額持續快速增長。其中倉儲物流是物流產業中最重要的環節之一,也是對網絡需求最多的物流子場景,倉儲IT投資在整個物流行業中占比達47%。從行業趨勢上看,倉儲物流行業向信息化、自動化、智能化發展,具備如下特征:
1) 電商作為強有力的驅動力,促進物流市場空間迅速增長,CAGR超過12%;
2) 人力成本提高及需求的不斷增加促進物流產業向自動化、智能化發展;
3) 第三方物流廠商在物流產業比重不斷提高,歐美最高可達70%以上,專業性提高;
4) 電商促進冷鏈建設,對設備環境要求提高。

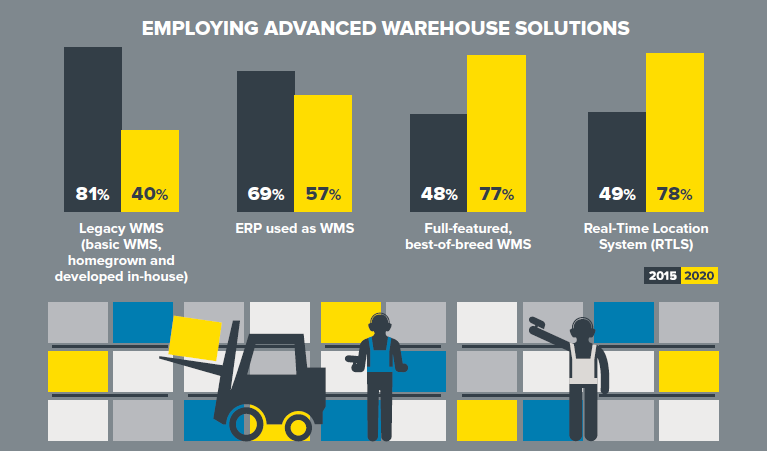
圖1-1 倉儲應用從人工操作向自動機械模式演進
從業務形態上看,呈現出傳統的人工操作物流機械、掃描設備向機器人、全自動化方向快速演進(見圖1-1)。智能倉儲裝備成為物流行業發展的下一個風口。行業預期5年內世界倉儲物流機器人出貨量增長15倍,達到62萬臺,市場規模增長11倍達到224億美金(見圖1-2)。

圖1-2 全球倉儲物流機器人出貨量及市場規模
國內近年電商業務快速發展和競爭的日益激烈是推動倉儲物流建設需求持續增長主要因素。同時為提升效率和降低成本,主流電商和物流平臺積極推動倉儲物流的自動化。例如,京東倉儲規模保持每年40%增長率(見圖1-3),其無人倉自2017年開始試點,首個商用全程無人分揀中心在昆山試運行。后續將逐步商用和部分替代普通倉庫,預計3年內部署10萬臺AGV,自動化、智能化是電商倉儲的未來發展趨勢。
2017年8月國內目前規模最大的自動分揀倉庫,在菜鳥廣東惠陽分揀中心投入使用。菜鳥計劃從2017開始逐步復制自動無人倉儲模式,全國多地開始使用分揀機器人。預計2020年菜鳥物流預計達到1300W平米的倉儲規模,智能倉儲是未來5年菜鳥物流的4大重點投資領域之一。

圖1-3 京東倉儲、智能倉儲增長趨勢
1.2實施目標
本方案主要針對解決以下三個問題:
1) 目前物流倉儲實際項目使用中存在的典型問題是終端與WLAN網絡來自不同供應商,由于WLAN的協議沒有規定終端應該在什么狀態下進行漫游,因此終端的漫游行為往往依賴于芯片廠商提供的默認保守配置。這就導致在情況及其惡劣的下仍發生漫游,而此時網絡連接已經極差;
2) 11k與11r這兩項專門用于提高漫游速度的協議并非強制,相當比例的終端并不支持,這一問題導致終端在與前一BSS連接斷開、漫游前需進行全信道掃描,這對于連續的、延遲敏感的網絡業務來說是災難性的;
3) 工業級場景下AP的掛高較高,因此覆蓋區域內可能存在大量小車并發的時候大量空口交互、退避,導致一定比例的終端無法得到及時調度,從而產生一片區域癱瘓的情況。
1.3適用范圍
本解決方案適用于工業互聯網的倉儲物流、智能生產、運輸等應用場景。
4.%2 在工業互聯網網絡體系架構中的位置
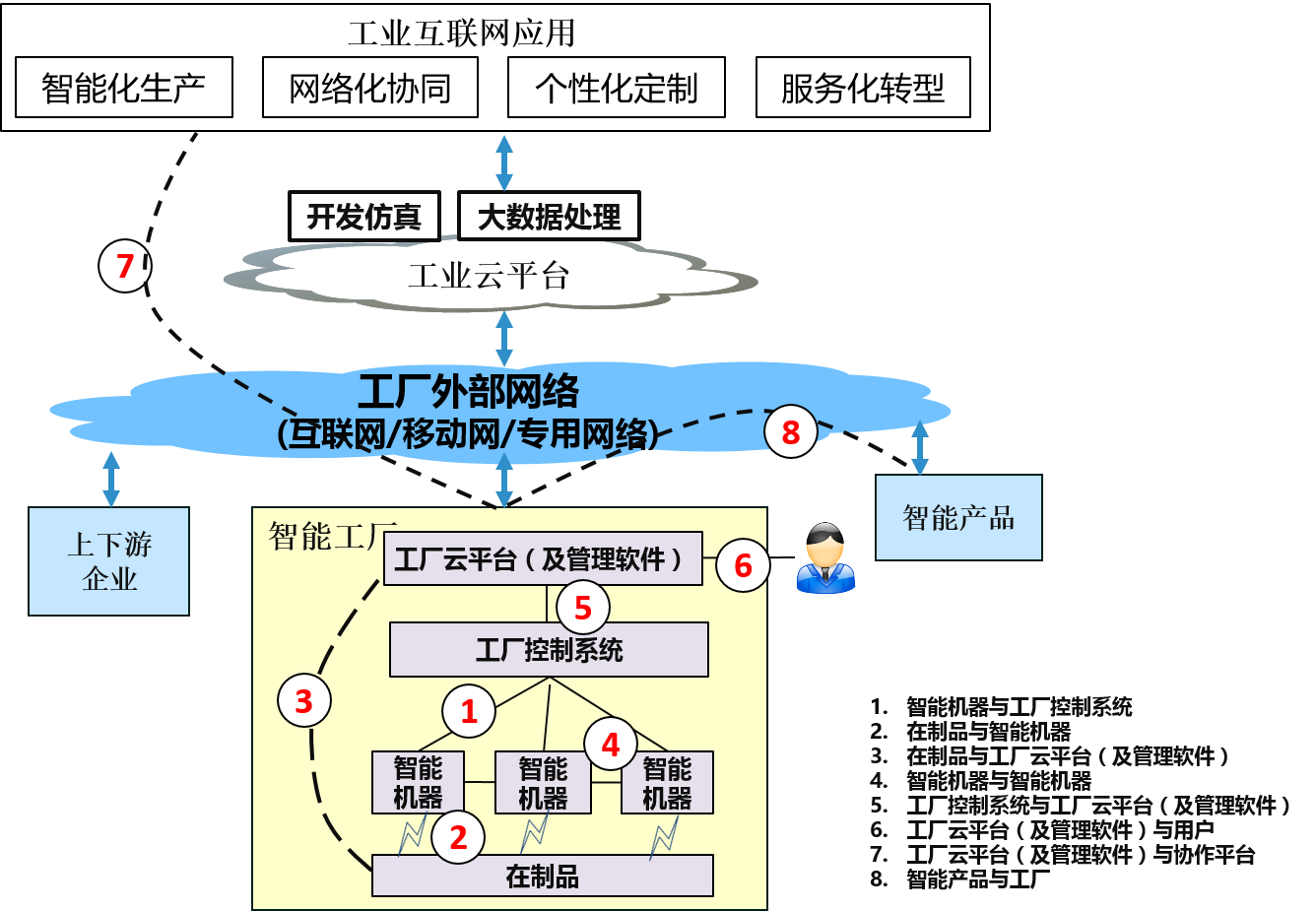
圖1-4 工業互聯網互聯示意圖
在圖1-4工業互聯網體系架構中,處在“1在制品和智能機器位置”,為在制品提供原料、配件、半成品、成品的自動運輸和物流倉儲,通過更加智能的手段,更可靠的調度和分配,節省人力物力,提高生產和物流效率。
2、需求分析
當前自動倉儲主要包括三種應用場景:AGV自動揀選、自動貨架裝卸、AGV自動分揀。
1)AGV自動揀選
傳統有人倉庫,貨物采用人工揀選方式。即人員根據訂單信息,在貨架區域中尋找貨物。然后將找到所有貨物掃碼、裝框后交給打包環節。需要人力投入大、勞動強度較高、揀選效率難以滿足忙時要求。

圖1-5 AGV自動揀選
自動揀選由后臺控制AGV將相應貨架托舉到揀選區域,排隊等候完成掃碼裝框。提升人員揀選效率、降低工作強度,提升倉庫貨物吞吐量。
2)自動貨架裝卸
在堆貨貨架區域,傳統采用人工或人工操作叉車取放貨物。自動貨架Shuttle(見圖1-6),根據后臺指令負責在立體貨架區域的貨物裝卸操作。

圖1-6 自動貨架裝卸
目前,該環節不是自動物流主要效率瓶頸;目前接觸的主流倉儲客戶暫無大規模建設的計劃。且技術上有被無人叉車等其他技術替代的可能性。該場景不在本案例需求分析優化范圍之內。
3)AGV自動分揀
傳統人工分揀或傳送帶分揀存在錯誤率較高、效率較低、忙時大量貨物積壓的情況。
AGV自動分揀場景(見圖1-7),分揀機器人自動掃描包裹條碼,將包裹和分發指令下發給分揀AGV。AGV自動導航到指定的分揀口,將貨物投入物流框。該場景下AGV密度較高,1000平米分揀庫區,忙時AGV可達200臺。

圖1-7 AGV自動分揀
對于以上提到的揀選、分揀場景,都需要通過WLAN網絡實現AGV小車位置、狀態信息上報,和任務、運行控制指令的下發。WLAN網絡需要保障運行控制信息實時、可靠、正確傳遞給目標設備。
3解決方案
3.1方案介紹
在本方案中,華為主要聚焦在通信管道領域,為自動倉儲系統提供穩定可靠的WLAN通信系統解決方案,包括針對性優化網絡控制算法和特性設計,需要同時提升AGV網卡軟硬件可靠性、優化終端側算法機制,以配合網絡側實現端到端的空口性能可靠。此外,需要AGV終端配合采集網絡和終端運行信息、提供調測接口,以滿足網絡倉儲自動網絡的運維要求。上海快倉主要負責在端測調用接口,進行端管適配,構建完整的方案。
3.2 系統架構
WLAN倉儲AGV通信系統由AC、AP、AGV網卡(或CPE)三部分共同組成(見圖1-8)。
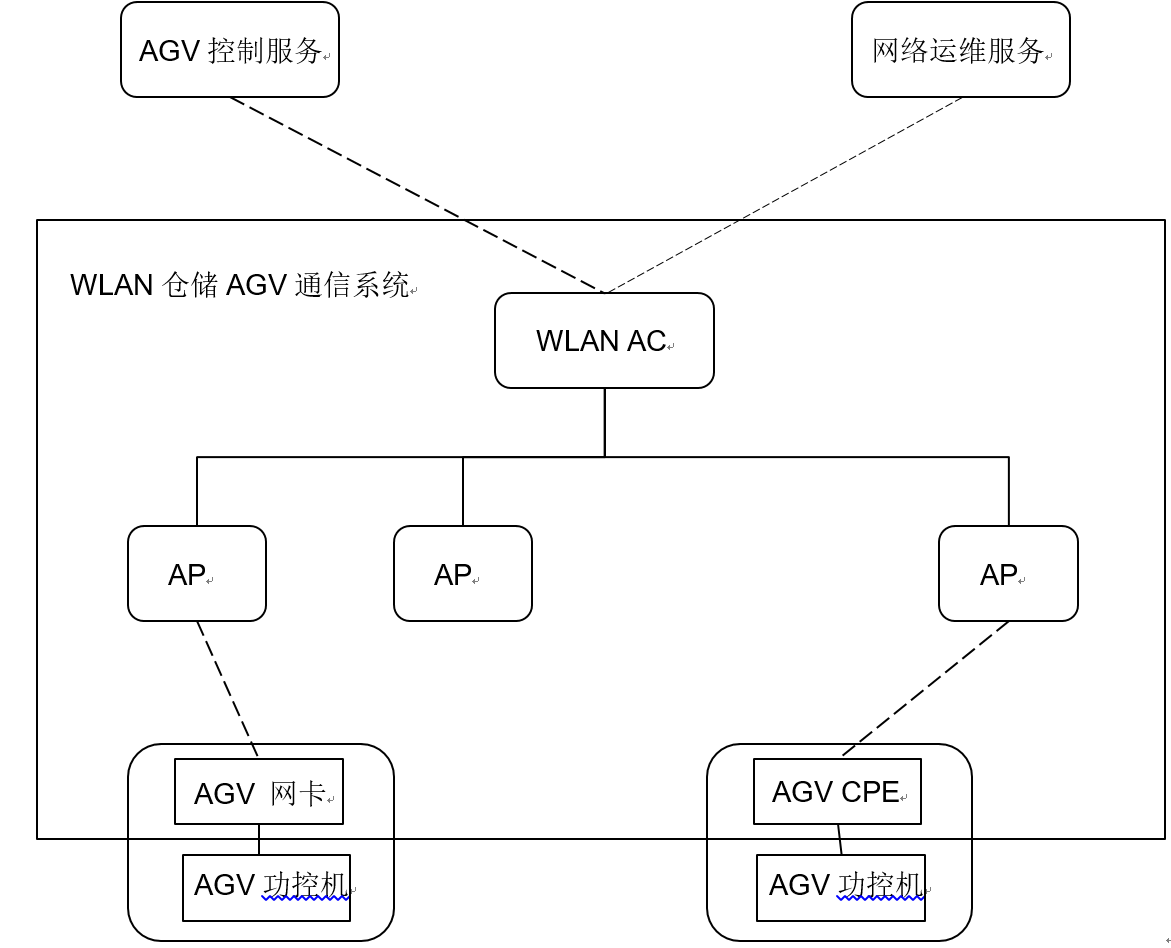
圖1-8 WLAN倉儲AGV通信系統模型
外部接口包括:
1)AGV業務控制系統:
AGV終端網絡信息接口(系統獲取AGV終端網絡側連接狀態、流量統計、漫游切換等信息)。
AGV設備信息接口(通報sta對應的AGV設備ID、狀態、位置、速度等信息)。
2)網絡運維平臺:
網絡設備運維接口(上報網絡側統計、狀態、漫游、速率、異常日志等信息)。
AGV STA運維接口(上報STA鏈接狀態、漫游切換、異常日志等信息)。
系統接口包括AP/AGV終端接口,主要負責AGV狀態、網絡掃描等信息上報網絡,網絡控制引指令、推送信息下發等功能。
3.3 網絡拓撲設計
本系統網絡拓撲如圖1-9所示。
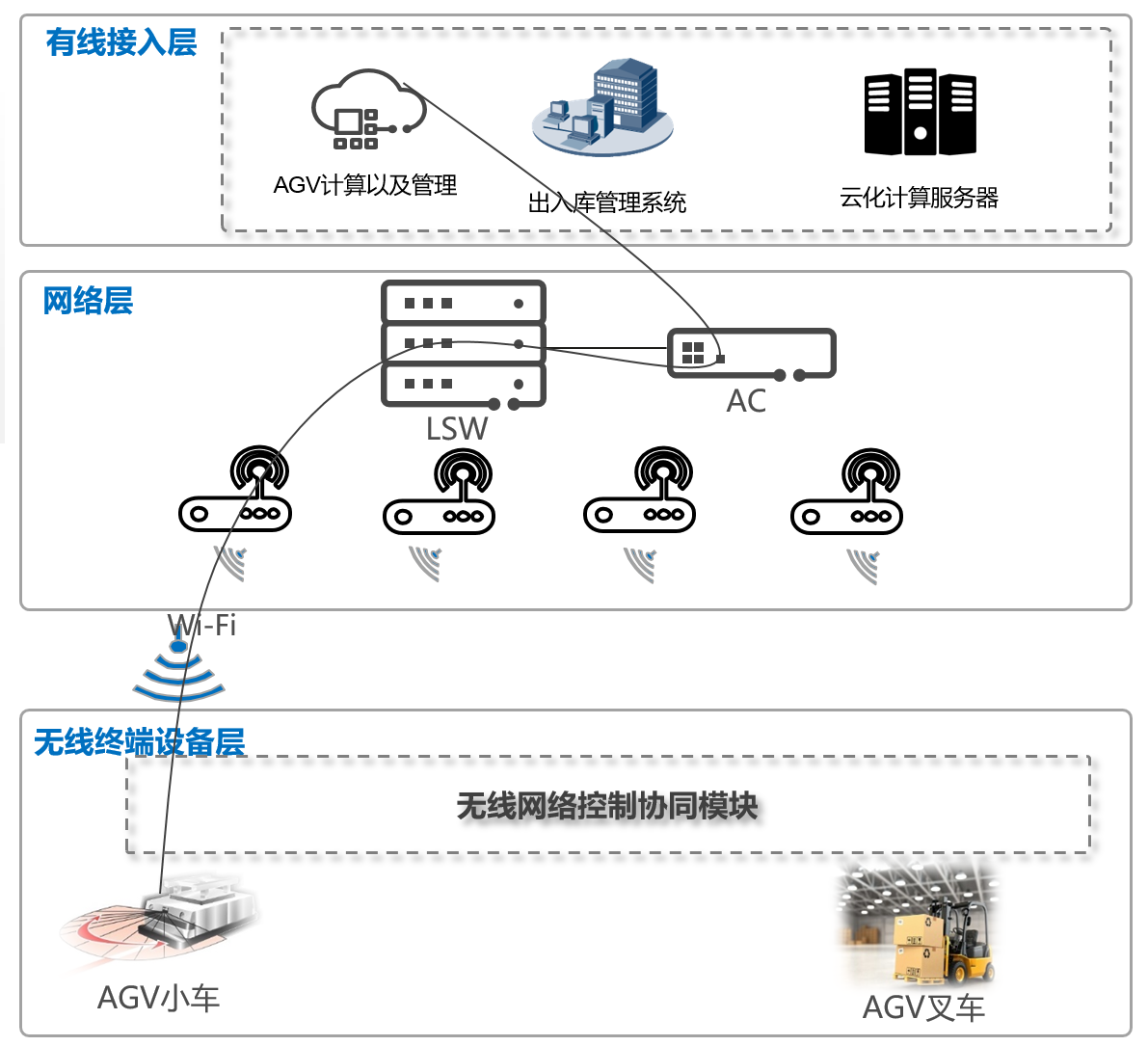
圖1-9 系統網絡拓撲
6.4 功能設計
工控機的無線網絡作用在于提供工控機核心運算單元到后臺服務器數據鏈路。可通過以太網口外接獨立CPE無線網卡獲取,也可在工控機內部以mini PCIe或USB的方式增加Wi-Fi模塊,并通過饋線與外部天線連接的方式實施。
在以太網口外接獨立CPE無線網卡的部署方式下,共涉及兩個接口,分別為電源接口與數據接口。若工控機的以太網口和CPE網卡支持PoE功能,且電壓、功率都匹配,則供電接口和數據接口可歸一為RJ-45等以太接口。否則需分別連接電源與數據,即AGV需為CPE網卡提供額外的電源接口。同時,為了保證數據鏈路,工控機需部署以太網絡模塊。從安裝方式的角度來看,AGV需為CPE無線網卡提供安裝與固定位置、走線的固定方式,且保證CPE的無線網卡不被金屬部件遮蔽。在這一場景下,CPE無線網卡對工控機來說僅僅是一個網絡設備,所有的傳輸控制、空口行為、協議棧都由CPE無線網卡負責,無線網卡的組成部分為CPU、Wi-Fi芯片;此時工控機本身無需任何處理,無線網絡與操作系統完全解耦。在操作系統內網絡外設擁有某一ip地址,CPE無線網卡擁有2個ip地址,其中一個ip地址用于連接工控機,另一個ip地址用于網絡側通信。該場景下接口示意如圖1-10所示。
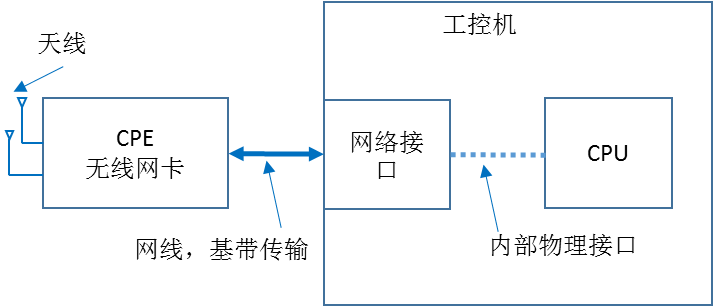
圖1-10 以太網口外接獨立CPE無線網卡場景接口示意
在無線網卡部署于工控機內部的場景下,由于mini PCIe或USB接口都提供標準的供電能力,且提供數據接口,因此僅需考慮網絡接口。工控機的核心運算單元通過高速物理接口、PCB走線連接至無線網卡的高速物理接口,傳輸基帶信號,由無線網卡進行調制、解調的功能。此時CPU即為工控機的CPU、無線網卡僅為Wi-Fi芯片,協議棧部分由操作系統中的驅動部分負責。在這一場景下,無線網絡與操作系統耦合較為緊密,空口行為的修改需配套對操作系統進行調整。該場景下接口示意如圖1-11所示。
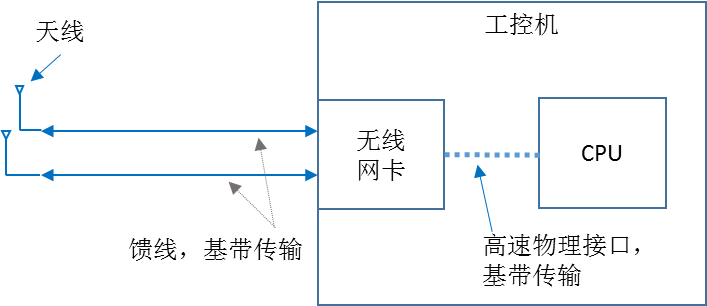
圖1-11 無線網卡部署于工控機內部場景接口示意
3.5 優化效果
在華為和快倉的端管方案和WIFI6 AP的助力下,經過實際測試,優化效果如圖1-12所示。
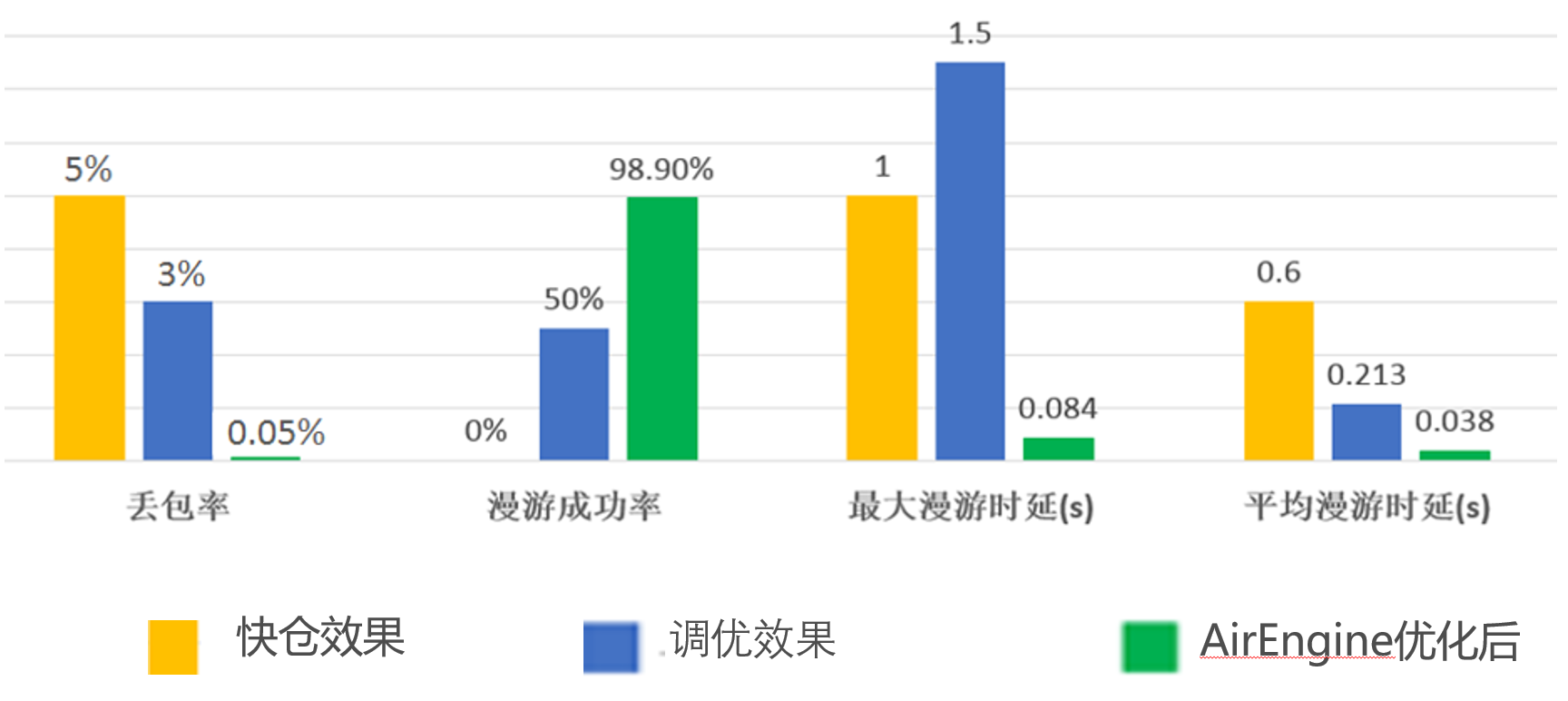
圖1-12 方案優化對比
4、成功案例
汕頭某倉庫使用本方案網絡升級改造后,AGV速率提升25%,承載AGV數量從500提升750,網絡無故障運行時間從24小時提升至72小時。運維效率提升50%。出單成功率從10萬單/天提升至13萬單/天,出單率提升30%。
從快倉的實際使用情況來看,該方案為業內最佳無線承載方案。接下來快倉計劃在快倉的惠陽、汕頭、無錫等倉儲基地進行廣泛復制。